三菱PLC与旋转编码器的程序例子
的有关信息介绍如下:旋转编码器是通过光电转换,将输出至轴上的机械、几何位移量转换成脉冲或数字信号的传感器,
主要用于速度或位置(角度)的检测。
典型的旋转编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干
个长方形狭缝。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转。
经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号。
通过计算每秒旋转编码器输出脉冲的个数就能反映当前电动机的转速。
一般来说,根据旋转编码器产生脉冲的方式的不同,可以分为增量式、绝对式以及复合式三大类。
自动线上常采用的是增量式旋转编码器。
增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;
A、B两组脉冲相位差90,用于辩向:当A相脉冲超前B相时为正转方向,而当B相脉冲超前A相时则
为反转方向。
Z相为每转一个脉冲,用于基准点定位。
1、三菱PLC的高速计数器
高速计数器是PLC的编程软元件,相对于普通计数器,高速计数器用于频率高于机内扫描频率的机外
脉冲计数。
由于计数信号频率高,计数以中断方式进行,计数器的当前值等于设定值时,计数器的输出接点立
即工作。
三菱PLC内置有21点高速计数器C235~C255,每一个高速计数器都规定了其功能和占用的输入点。
⑴
高速计数器的功能分配如下:
C235~C245共11个高速计数器用作一相一计数输入的高速计数,即每一计数器占用1点高速计数输入点。
计数方向可以是增序或者减序计数,取决于对应的特殊辅助继电器M8□□□的状态。
例如C245占用X002作为高速计数输入点,当对应的特殊辅助继电器M8245被置位时,作增序计
数。
C245还占用X003和X007分别作为该计数器的外部复位和置位输入端。
C246~C250共5个高速计数器用作一相二计数输入的高速计数。
即每一计数器占用2点高速计数输入,其中1点为增计数输入,另一点为减计数输入。
例如C250占用X003作为增计数输入,占用X004作为减计数输入。
另外占用X005作为外部复位输入端,占用X007作为外部置位输入端。
同样,计数器的计数方向也可以通过编程对应的特殊辅助继电器M8□□□状态指定。
C251~C255共5个高速计数器用作二相二计数输入的高速计数。
即每一计数器占用2点高速计数输入,其中1点为A相计数输入,另1点为与A相相位差90º的B相计数
输入。
C251~C255的功能和占用的输入点如表5-14所示。
表5-14 高速计数器C251~C255的功能和占用的输入点
X000 X001 X002 X003 X004 X005 X006 X007
C251 A B
C252 A B R
C253 A B R
C254 A B R S
C255 A B R S
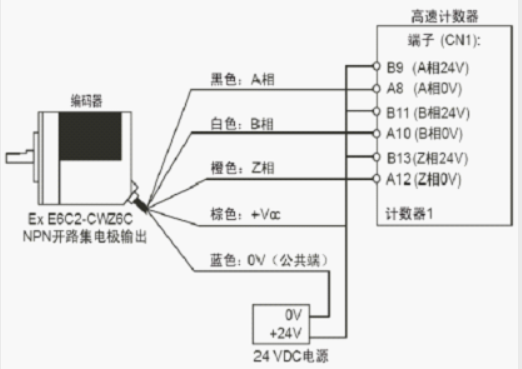
如前所述,分拣单元所使用的是具有A、B两相90º相位差的通用型旋转编码器,且Z相脉冲信号没有
使用。
由表5-14,可选用高速计数器C251。这时编码器的A、B两相脉冲输出应连接到X000和X001点。
⑵
每一个高速计数器都规定了不同的输入点,但所有的高速计数器的输入点都在X000~X007范围内,
并且这些输入点不能重复使用。
例如,使用了C251,因为X000、X001被占用,所以规定为占用这两个输入点的其他高速计数器,
例如C252、C254等都不能使用。
2、高速计数器的编程
如果外部高速计数源(旋转编码器输出)已经连接到PLC的输入端,那末在程序中就可直接使用相对
应的高速计数器进行计数。
例如,在图5-18中,设定C255的设置值为100,当C255的当前值等于100时,
计数器的输出接点立即工作。从而控制相应的输出Y010 ON。
由于中断方式计数,且当前值=预置值时,计数器会及时动作,但实际输出信号却依赖于扫描周
期。
如果希望计数器动作时就立即输出信号,就要采用中断工作方式,使用高速计数器的专用指令。
三菱PLC高速处理指令中有3条是关于高速计数器的,都是32位指令。
它们的具体的使用方法,请参考三菱PLC编程手册。
扩展资料:
三菱PLC的两个高速口可以产生脉冲来控制伺服(或步进)电机的转速。
例如:脉冲频率为10000HZ,驱动器每2048个脉冲转一圈,电子齿轮比4/1(可调),
则转速为10000/(2048*4)*4/1 r/s。
可以利用高速计数器的啊C235~255都是高速计数器的。
然后你可以就是测量脉冲的位置然后给C235一个你要到达的位置的地方就可以定位到你想要的高
度。
脉冲相对于当前位置减少的时候就是电机反转了你可以在写一个比较指令与实际位置比较这样就可
以判断出电机的正反转了。
参考资料:百度百科-旋转编码器